Exercício: estimativa de parâmetros
Dado um conjunto de pontos homólogos, com coordenadas conhecidas em duas imagens, se deseja calcular os parâmetros de uma transformação geométrica usando polinômio de primeira ordem para transformar a geometria de uma das imagens (Direita B) para a geometria da segunda imagem (esquerda A).
Para isto, unsado o Multyispec, leia pares de pontos homólogos (o mesmo ponto nas duas imagerns) e crie uma tabela similar à listada abaixo, e salve em um arquivo ASCII.
|
- uma função para ler uma tabela ascii com 4 colunas
- o programa que
- chama a função para ler o arquivo
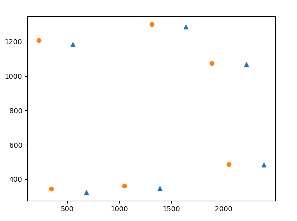
- imprime a tabela e mostra os pontos como um gráfico
Se tudo deu certo, você verá a tabela na área de diálogo do Pyzo, e um gráfico como este:
|
x_imagem A, Y_imagemA, X_imagemB, Y_imagemB
Você também poderia ter:
Linha_imagem A, Coluna_imagemA, Linha_imagemB, Coluna_imagemB
tome cuidado na ordem na que você criou sua tabela.
Nesta parte do programa as coordenadas da primeira coluna X_imagemA são armazenadas nas linhas pares (0,2,4,5...) do vetor Y e as coordenadas Y_imagemA da segunda coluna são armazenadas nas linhas ímpares.
|
você deve ter uma saída como esta abaixo. Confira as coordenadas com a tabela.
|
Agora Usamos a mesma lógica para preencher a matriz X com as coordenadas da segunda imagem (terceira e quarta colunas, índicex 2 e 3). Verifique na área de diálogo os valores da tabela.
|
- Y = X * A
- A = inv(X_transp * X)* X_transp * Y
para multiplicaçãod e vetores e matrizes, bem como a manipulação de matrozes, podemos usar a biblioteca numpy (dor, linalg.inv, transpose).
FInalmente, com os parâmetros, podemos calcular os valores estimados de Y, as coordenadas da primeira imagem, com base nas coordenadas da segunda imagem e calcualr a diferença entre as coordenadas prteditas pelo modelo y as coordenadas observadas, para avaliar se o modelo está predizendo bem as posições.## solucao do sistema ## transpor matriz X Xt= np.transpose(X) print('Matriz transposta') print(Xt) ## produto vetorial= dot (dot product) C=np.dot(Xt,X) print(C.shape) D=np.linalg.inv(C) # inverter matriz 6x6 B=np.dot(Xt,Y) A=np.dot(D,B) print('solucao') print(A)## calcule residuos R= np.dot(X,A) Dif=Y - R # diferença entre REAL e estimad print('real, estimados, diferenca') for i in range(npt): print(": %5.2f %5.2f %5.2f %5.2f %5.2f %5.2f " % ( Y[2*i], R[2*i], Dif[2*i] , Y[2*i+1], R[2*i+1], Dif[2*i+1] ) )Um bom resultado seria caracterizado por diferenças pequenas entre os valores observados e os calculados. como ficou o resultado na sua avaliação? Qual é a distância de cada ponto considerando as coordenadas observadas e as calculadas ? Qual a distância média ?