LiDAR - Laser scanner aerotransportado - padrões de varredura
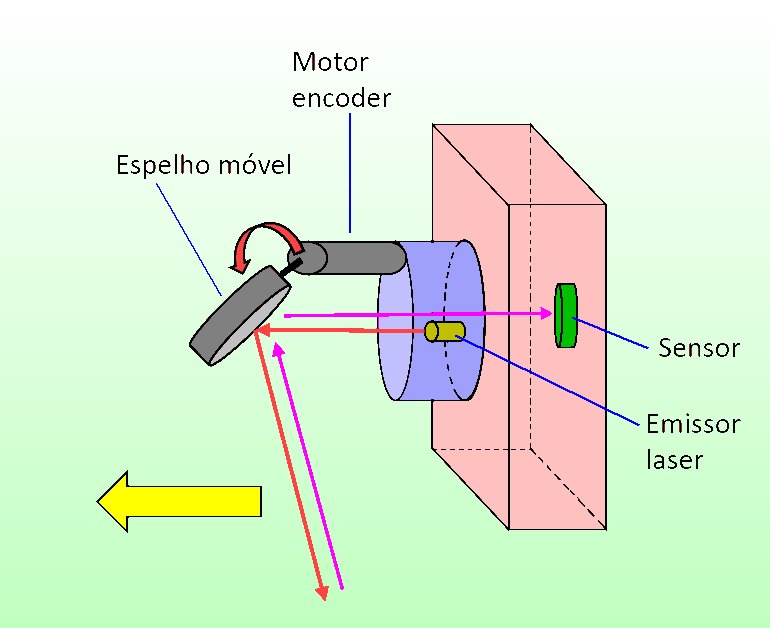
Esquema de um sistema de varredura por espelho móvel.
Como a aeronave se desloca para frente e a varredura é na direção transversal ao deslocamento da aeronave, o laser é projetado na superfície do terreno seguindo um padrão de Zig-Zag. Porém, esta não é a única alternativa de varredura. A seguir são mostrados três sistemas de varredura junto com o padrão que eles produzem na superfície do terreno:
Existe ainda sistemas que usam fibras ópticas para efetuar uma varredura mais uniforme, pois o uso de espelhos sempre pode trazer inconstância no movimento, porém não são tão comuns no Brasil.
consulte Airborne laser scanningan introduction and overview, Wehr & Lohr (1999). ISPRS Journal of Photogrammetry & Remote Sensing 54 1999 6882.
Agora você pode voltar ao menu principal, ou ao menu desta aula ou continuar para o próximo módulo .
Jorge Centeno: centeno@ufpr.br