LiDAR - Mínimo do bloco
Se um ponto é do terreno, ele é o mínimo.
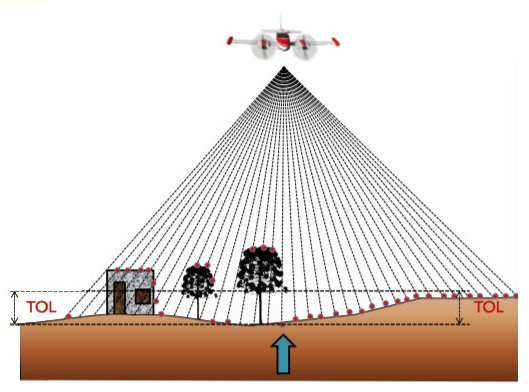
No exemplo ao lado encontra-se representado um trecho de um levantamento LiDAR aerotransportado.
Alguns pontos foram interceptados pela vegetação ou construções e a interpolação de um modelo não refletiria a variação do terreno.
Para detectar os pontos no terreno é assumido que, se pelo menos um ponto atingiu o solo, esse ponto tem a cota mínima.
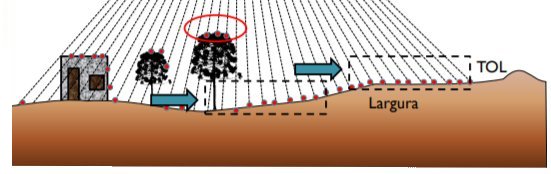
Como a variação do terreno não é abrupta, é ainda suposto que outros pontos com cota parecida ao mínimo na proximidade também podem ser considerados do terreno.
Claro, que, na medida em que a distância ao ponto mínimo cresce, a probabilidade desta suposição diminui.
Ela é válida só na região mais próxima ao mínimo.
Então, o método consiste em delimitar uma região na nuvem e detectar o mínimo, considerando este ponto como sendo do terreno.
A seguir é fixado um limite de tolerância na direção vertical e todos os pontos na região cuja cota seja próxima ao mínimo são considerados como do terreno.
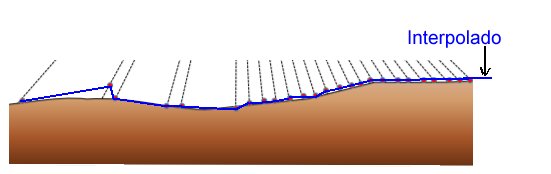
Aqueles com cotas mais altas são descartados.
Esta análise é repetida, deslocando a região ao longo de toda a nuvem de pontos.
Os pontos classificados como "terreno" são então usados para interpolar um modelo digital da superfície do terreno.
Este modelo é chamado também de MDT Modelo Digital do Terreno.
A escolha do melhor limiar de TOL-erância depende do relevo.
Em locais planos o valor pode ser pequeno.
Já em locais acidentados deve-se usar uma tolerância maior.
 -
-
Agora você pode voltar ao menu principal, ou ao menu desta aula ou continuar para o próximo módulo .
Jorge Centeno: centeno@ufpr.br