LiDAR - Laser scanner aerotransportado - posição
Sistema de varredura aerotransportado.
Os alunos de Engenharia Cartográfica da UFPR aprendem posicionamento por satélite em detalhe em uma disciplina específica. Aqui são apresentadas apenas noções de como esta tecnologia é usada no contexto de LiDAR aerotransportado.
O sistema de posicionamento por satélite global (Global Positioning System - GPS) calcula a posição do usuário usando um receptor que recebe informações de uma rede de satélites artificiais localizados em torno da terra, através de trilateração. Os sinais emitidos pelos satélites em torno da Terra podem ser captados por um receptor GPS usando uma antena instalada no topo da aeronave. O sinal contém informações como parâmetros orbitais e tempo.
Com base no sinal recebido, é possível calcular a distância entre o satélite e a antena do receptor, mas com apenas um único satélite não é possível calcular a localização da antena. Porém, com os sinais de três satélites, mínimo, dado que a posição dos satélites é conhecida, torna-se possível combinar as três medidas de distância para determinar a posição da antena.
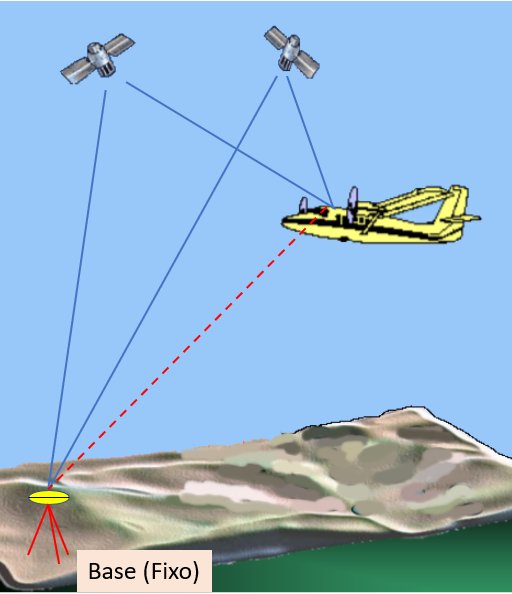
GPS diferencial Para reduzir os erros na medição e aumentar a acurácia posicional, a técnica mais recomendada é o GPS Diferencial. Isto consiste em usar dois receptores GPS, um instalado no avião, móvel, e um instalado em um ponto com coordenadas conhecidas na terra (fixo). Como os dois receptores se encontram próximos, os erros que afetam um se repetem no outro. Então pode-se calcular os erros com base nos dados do receptor fixo e corrigir os dados captados pelo receptor móvel.
Um problema do uso dos sistemas de apoio GPS e inercial é que estes sistemas tem baixa taxa de coleta de dados em relação à elevada taxa de coleta do varredor a laser e, para poder calcular a posição de todos os pontos medidos pelo varredor, é necessário realizar interpolações entre medidas reais, o que pode introduzir erros.
Por exemplo, o receptor GPS mede um ponto por segundo e nesse intervalo o varredor pode ter lido em torno de 150 pontos ou mais, dependendo da frequência de coleta do dispositivo.
Embora a acurácia dos equipamentos usados seja alta, pequenos erros são significativos quando se considera que o cálculo da coordenada do ponto é resultado da simulação da projeção do feixe a uma altura em torno de 1000 metros. uma pequena variação angular, por exemplo, pode ser traduzida em um deslocamento significativo na superfície do terreno em função da altura do avião.
Agora você pode voltar ao menu principal, ou ao menu desta aula ou continuar para o próximo módulo .
Jorge Centeno: centeno@ufpr.br